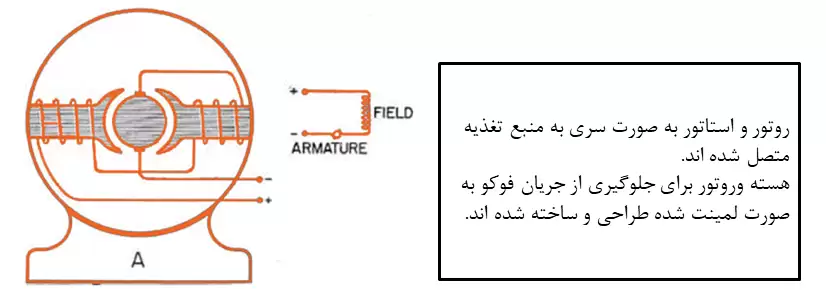
پس از روشن شدن موتورمقاومت میدان سری را کاهش می دهد و باعث می شود سیم پیچ شنت منبع اصلی شار میدان باشد. بنابراین در هنگام روشن شدن موتورهمانند یک موتور سری DC رفتار کرده و در ادامه با کاهش مقاومت میدان سری، رفتار موتور همانند یک موتور شنت خواهد بود.
مزایای استفاده از موتورهای ترکیبی DC
موتورهای ترکیبی از مشخصات سری و موتور شنت تشکیل شده اند و این بدان معناست که ما با موتوری روبرو هستیم که توانایی گرفتن نکات مثبت از هر دو موتور را دارد. یک موتور شنت با سرعت ثابت کار می کند. بنابراین ، این نوع موتور برای برنامه هایی که به سرعت متغیر نیاز دارند ، مناسب نیست. با این وجود، موتورهای ترکیبی DC به دلیل وجود یک میدان مغناطیسی سری ، کنترل سرعت بسیار خوبی دارند. به لطف وجود ویژگی های این دو موتور در موتورهای ترکیبی DC ، آنها می توانند حتی بدون بار کار کنند. آنها می توانند در برخی از سرعت ها با سرعت زیادی کار کنند. در نتیجه، می توان از موتور ترکیبی تقریباً در تمام برنامه هایی که می توان از موتورهای شانت و سری استفاده کرد . در بعضی از برنامه ها، موتور سری از کار می افتد اما شنت مفید خواهد بود و در بعضی موارد، شنت خراب می شود اما سری ها قادر به انجام وظیفه هستند.
معایب موتورهای ترکیبی
موتور DC مرکب ترکیبی از موتور سری و موتور شنت است. بنابراین، هم خصوصیات سری و هم موتور شنت را فراهم می کند با این حال، این یک توافق بین هر دو سری و موتور شنت است. الکتروموتور آن به دلیل وجود سیم پیچ میدان شنت دارای گشتاور راه اندازی خوبی در مقایسه با موتور DC شنت است اما در مقایسه با موتور DC سری به دلیل تلفات داخلی، گشتاور راه اندازی کمی ضعیفی دارد. به طور مشابه، موتور ترکیبی DC می تواند با سرعت دیگری کار کند و همچنین تنظیم سرعت بهتری را در مقایسه با موتور شنت DC فراهم می کند. با این حال ، به دلیل تلفات داخلی و توزیع بین سری و سیم پیچ میدان شنت، به خوبی موتور سری DC نیست. به طور خلاصه ، موتور ترکیبی DC دارای خواص ترکیبی موتورهای شانت و موتورهای شنت در یک موتور با هزینه کمتری در عملکرد است. بنابراین، نمی تواند از خواص خوب موتورهای شانت و سری DC پیشی بگیرد.
- یک موتور ترکیبی نیز به دلیل قدیمی شدن قطعات به تعمیر و نگهداری مکرر نیاز دارد.
- هزینه های نگهداری نسبتاً زیاد
- به دلیل وقوع جرقه در برس های کربنی، این نوع موتور برای محیط خطرناک مناسب نیست.
- در مقایسه با موتورهای AC و به دلیل وجود اجزای منقضی شده با افزایش سن مانند برس، طول عمر موتور DC کمپوند کمتر است.
- در موتور کمپوند کاهنده که یکی از انواع موتورهای ترکیبی است، شار میدان سری و میدان شنت در برابر یکدیگر قرار می گیرند که باعث شار کمتر و در نتیجه گشتاور کم می شود. این ویژگی باعث می شود موتور حتی با تغییر ناچیز بار نیز ناپایدار باشد.
- موتور ترکیبی دیفرانسیل به دلیل رفتار ناپایدار حتی با اندکی تغییر در بار، نمی تواند برای هرگونه کاربرد عملی مورد استفاده قرار گیرد.






















سلام. برای پمپ ساختمان با تعداد واحد زیاد میشه از الکتروموتور DC استفاده کرد؟ شرایطی که بشه سرعت پمپ کرو کنترل کرد؟ منطقی هست؟
سلام
وقت بخیر – در تعداد واحدهای بالا و مسافت های زیاد به واسطه طول زیاد امکان استفاده از پمپ های با جریان برق DC نیست. جریان برق DC به واسطه نوع جریان امکان انتقال ولتاژ در مسیر طولانی را نداشته و ممکن است جریان برق را در ولتاژ های بالا یا پایین تر انتقال داده که به این واسطه موجب اختلال عملکرد پمپ شود. در مسیر های طولانی و تعداد واحد بالا حتما از ولتاژAC یا متناوب استفاده شود.